

|
| Cuota De Producción: | 1 |
| Precio: | US $3500.00 - 4880.00/ Set |
| Embalaje Estándar: | Caja de cartón/Cajón de madera |
| Período De Entrega: | 6~8 semanas |
| Forma De Pago: | T/T |
| Capacidad De Suministro: | 500 conjuntos por año |
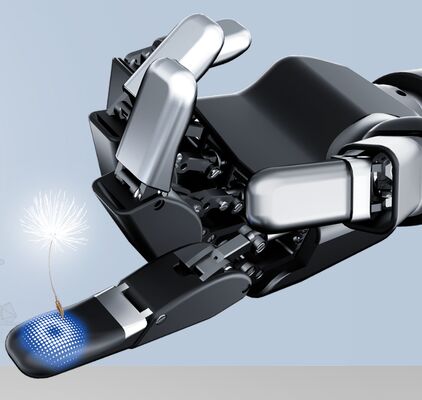
La DH-Robotics DH-5-6 es una mano robótica diestra comercial de 5 dedos con 6 GR de movimiento activo. Utiliza actuación impulsada por tendones con microactuadores lineales e integra percepción de fuerza/tacto para un agarre preciso. La mano está orientada a aplicaciones de robots humanoides, efectores finales de robots colaborativos, plataformas de investigación y educación donde se requiere destreza rentable.
| Parámetro | Especificación |
|---|---|
| Número de Dedos | 5 dedos |
| GR de Movimiento Activo | 6 |
| Articulaciones Totales | 12 |
| Actuación | Impulsada por tendones (microactuadores lineales) |
| Detección | Retroalimentación de fuerza / tacto |
| Control | Control híbrido de posición-fuerza |
| Comunicación | CAN / RS485 / EtherCAT |
| Peso | Aprox. 400–550 g |
| Fuerza por Dedo | 5–15 N (típico) |
|
|
| Cuota De Producción: | 1 |
| Precio: | US $3500.00 - 4880.00/ Set |
| Embalaje Estándar: | Caja de cartón/Cajón de madera |
| Período De Entrega: | 6~8 semanas |
| Forma De Pago: | T/T |
| Capacidad De Suministro: | 500 conjuntos por año |
La DH-Robotics DH-5-6 es una mano robótica diestra comercial de 5 dedos con 6 GR de movimiento activo. Utiliza actuación impulsada por tendones con microactuadores lineales e integra percepción de fuerza/tacto para un agarre preciso. La mano está orientada a aplicaciones de robots humanoides, efectores finales de robots colaborativos, plataformas de investigación y educación donde se requiere destreza rentable.
| Parámetro | Especificación |
|---|---|
| Número de Dedos | 5 dedos |
| GR de Movimiento Activo | 6 |
| Articulaciones Totales | 12 |
| Actuación | Impulsada por tendones (microactuadores lineales) |
| Detección | Retroalimentación de fuerza / tacto |
| Control | Control híbrido de posición-fuerza |
| Comunicación | CAN / RS485 / EtherCAT |
| Peso | Aprox. 400–550 g |
| Fuerza por Dedo | 5–15 N (típico) |

