|
|
| Cuota De Producción: | 1 |
| Precio: | 1500$ |
| Embalaje Estándar: | 169 cm (alto), 75 cm (ancho), 30 cm (largo) |
| Período De Entrega: | 1 mes |
| Capacidad De Suministro: | 99 unidades |
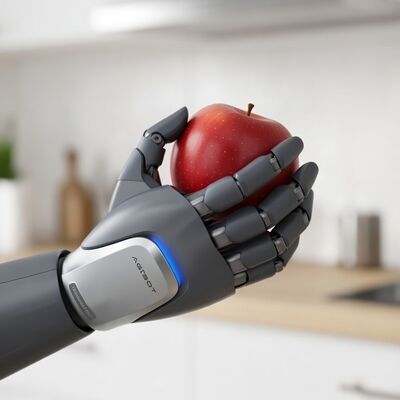
El nuevo AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand es un avanzado efector de extremo robótico diseñado para imitar el movimiento de la mano humana con precisión y flexibilidad.Esta mano robótica de cinco dedos apoya el movimiento coordinado de los dedos, agarre de alta precisión y retroalimentación inteligente de la fuerza para tareas de manipulación complejas.
OmniHand Pro 2025 es adecuado para robots humanoides, plataformas de investigación de robots de servicio y brazos robóticos industriales que requieren movimiento natural de la mano,manejo adaptativo de objetos y interacción segura entre humanos y robots.
Cada dedo puede moverse de forma independiente para realizar agarres y manipulaciones naturales similares al movimiento de la mano humana.
Los sensores de fuerza y táctil integrados permiten un control de agarre adaptativo basado en la forma, el peso y la fragilidad del objeto.
El control suave y preciso de múltiples articulaciones permite el manejo delicado y las tareas de manipulación complejas.
Los algoritmos avanzados de control digital permiten un movimiento rápido y un ajuste en tiempo real para un funcionamiento estable.
Apoya la integración con robots humanoides, brazos robóticos y robots de servicio mediante comunicaciones estándar e interfaces de montaje.
Las opciones de configuración flexibles permiten la personalización para tareas específicas o sistemas robóticos.
| Punto de trabajo | Especificación |
|---|---|
| Tipo de producto | Mano robótica humanoide de cinco dedos |
| Grados de libertad | Dedos independientes con múltiples articulaciones |
| Método de control | Control digital inteligente |
| El sentido | Fuerza y retroalimentación táctil |
| Compatibilidad | Robots humanoides y brazos robóticos |
| Comunicación | Interfaces de robótica estándar |
| Integración | Instalación y control modulares |
| Fuente de alimentación | Sistema de alimentación externa |
| Medio ambiente de funcionamiento | Espacios industriales y de investigación interiores |
Las especificaciones pueden variar según la configuración.
El AGIBOT OmniHand Pro 2025 combina un diseño mecánico humano con detección y control inteligentes para apoyar la próxima generación de robots humanoides y plataformas robóticas avanzadas.Ofrece manipulación de alto rendimiento y mayor flexibilidad para futuras aplicaciones.
Es una mano robótica humanoide de cinco dedos diseñada para la manipulación avanzada y el movimiento humano en robótica.
Sí, admite integración con robots humanoides, brazos robóticos y robots de servicio usando interfaces estándar.
Puede realizar agarrar, manejar, manipular objetos y tareas delicadas que requieren precisión y control adaptativo.
Sí, los sensores de fuerza y táctil integrados permiten un control de agarre adaptativo basado en la retroalimentación del contacto.
Sí, es ampliamente utilizado en laboratorios de investigación de robótica de IA y entornos de enseñanza para estudios avanzados de manipulación.
Su diseño modular permite la personalización para diferentes aplicaciones y requisitos del sistema.
|
|
| Cuota De Producción: | 1 |
| Precio: | 1500$ |
| Embalaje Estándar: | 169 cm (alto), 75 cm (ancho), 30 cm (largo) |
| Período De Entrega: | 1 mes |
| Capacidad De Suministro: | 99 unidades |
El nuevo AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Hand es un avanzado efector de extremo robótico diseñado para imitar el movimiento de la mano humana con precisión y flexibilidad.Esta mano robótica de cinco dedos apoya el movimiento coordinado de los dedos, agarre de alta precisión y retroalimentación inteligente de la fuerza para tareas de manipulación complejas.
OmniHand Pro 2025 es adecuado para robots humanoides, plataformas de investigación de robots de servicio y brazos robóticos industriales que requieren movimiento natural de la mano,manejo adaptativo de objetos y interacción segura entre humanos y robots.
Cada dedo puede moverse de forma independiente para realizar agarres y manipulaciones naturales similares al movimiento de la mano humana.
Los sensores de fuerza y táctil integrados permiten un control de agarre adaptativo basado en la forma, el peso y la fragilidad del objeto.
El control suave y preciso de múltiples articulaciones permite el manejo delicado y las tareas de manipulación complejas.
Los algoritmos avanzados de control digital permiten un movimiento rápido y un ajuste en tiempo real para un funcionamiento estable.
Apoya la integración con robots humanoides, brazos robóticos y robots de servicio mediante comunicaciones estándar e interfaces de montaje.
Las opciones de configuración flexibles permiten la personalización para tareas específicas o sistemas robóticos.
| Punto de trabajo | Especificación |
|---|---|
| Tipo de producto | Mano robótica humanoide de cinco dedos |
| Grados de libertad | Dedos independientes con múltiples articulaciones |
| Método de control | Control digital inteligente |
| El sentido | Fuerza y retroalimentación táctil |
| Compatibilidad | Robots humanoides y brazos robóticos |
| Comunicación | Interfaces de robótica estándar |
| Integración | Instalación y control modulares |
| Fuente de alimentación | Sistema de alimentación externa |
| Medio ambiente de funcionamiento | Espacios industriales y de investigación interiores |
Las especificaciones pueden variar según la configuración.
El AGIBOT OmniHand Pro 2025 combina un diseño mecánico humano con detección y control inteligentes para apoyar la próxima generación de robots humanoides y plataformas robóticas avanzadas.Ofrece manipulación de alto rendimiento y mayor flexibilidad para futuras aplicaciones.
Es una mano robótica humanoide de cinco dedos diseñada para la manipulación avanzada y el movimiento humano en robótica.
Sí, admite integración con robots humanoides, brazos robóticos y robots de servicio usando interfaces estándar.
Puede realizar agarrar, manejar, manipular objetos y tareas delicadas que requieren precisión y control adaptativo.
Sí, los sensores de fuerza y táctil integrados permiten un control de agarre adaptativo basado en la retroalimentación del contacto.
Sí, es ampliamente utilizado en laboratorios de investigación de robótica de IA y entornos de enseñanza para estudios avanzados de manipulación.
Su diseño modular permite la personalización para diferentes aplicaciones y requisitos del sistema.